Robotics & Autonomous Systems
Through a government-funded ROS 2 & AI training program, I extended my work from vehicle dynamics and control toward autonomous mobile robotics, integrating perception, navigation, and deployment-oriented system development.

Smart Office Robot Service (2026)
•
Developed a service-oriented indoor mobile robot system for office delivery, visitor guidance, and human–robot interaction using ROS 2, YOLO, web-based user interfaces, and centralized control/server modules.
•
Improved autonomous navigation and interaction behavior by working on obstacle avoidance, marker recognition, and robot interaction logic, including safety-policy-based responses for dynamic obstacles and guided motion that maintained user-relative distance during visitor assistance.
•
Contributed to an end-to-end robotics service prototype that integrated navigation, perception, task execution, and office-service workflows, while the overall system also incorporated AI-based modules for obstacle perception, face recognition, and language-driven task handling
AI Smart Shopping Cart System (2025)
•
Developed an AI-enabled smart shopping cart system that combined product recognition, obstacle detection, checkout flow, and user-facing interaction for a safer and more efficient retail experience.
•
Worked on obstacle labeling and training data preparation, and implemented the obstacle detection pipeline and risk-assessment logic for collision warning, including multi-level alerts through visual, tactile, and interface-based feedback.
•
Contributed to the machine-learning and perception side of the project by participating in model-improvement workflows involving YOLO-based recognition, data curation, CVAT-based labeling, and robustness-oriented refinement, while the full system connected AI server, main server, databases, cart device, and GUI into an end-to-end smart retail architecture.
Hyundai Project
Working with Hyundai Motor Company, as my lab, perhaps Korea’s largest automotive lab was consulting for one of the world’s top 3 automotive companies.
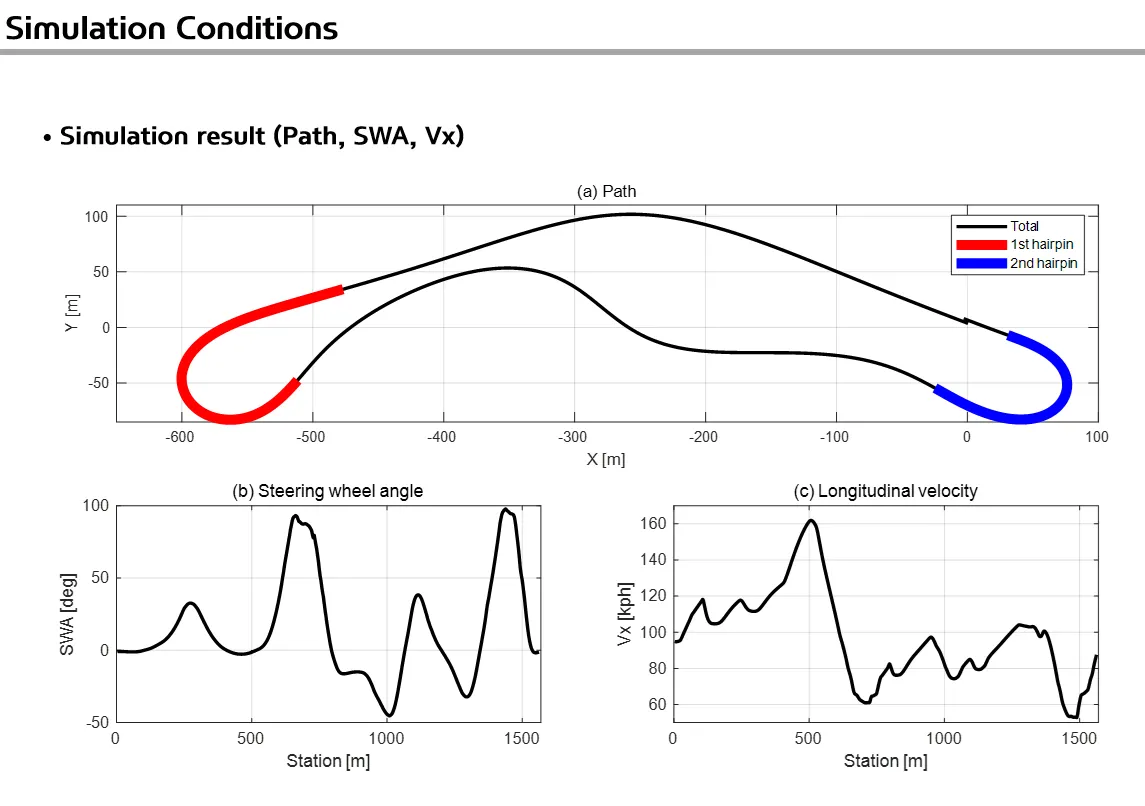
Simulation results of Tire force variation at Hyundai Motor Company (HMC) high-performance test track
Rear-wheel steering (RWS) system in operation, developed in collaboration with Hyundai Motor Group
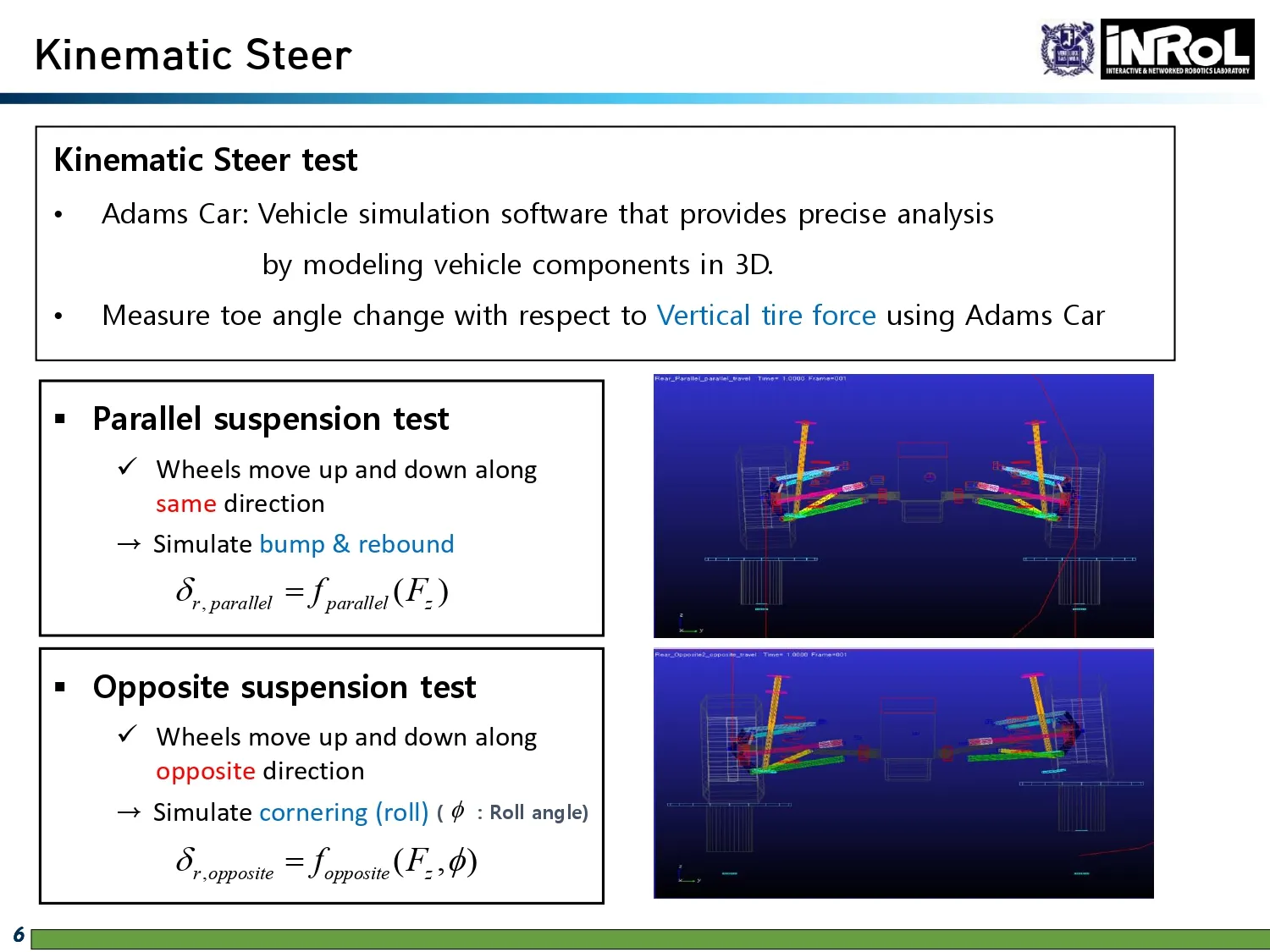
Parallel supension test:
ADAMS/Car test simulating bump and rebound conditions through parallel wheel travel to analyze kinematic toe angle changes
Opposite supension test:
ADAMS/Car test simulating cornering conditions through opposite wheel travel to analyze roll-induced toe angle behavior
Thesis
Estimating Rear Toe Angle Disturbance Due to Kinematic and Compliance Steer (Master’s Thesis)
•
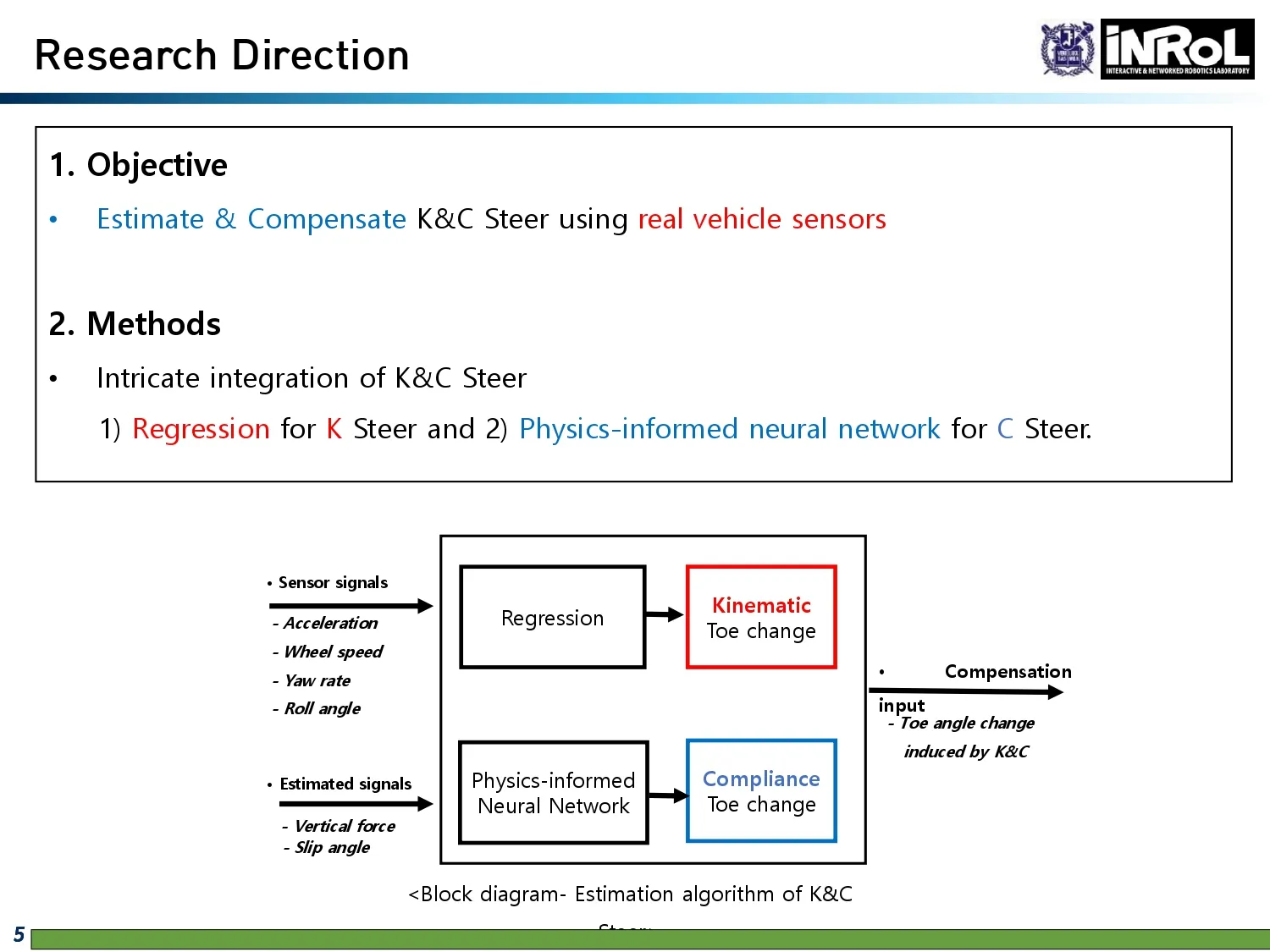
Developed an estimation model to predict rear-toe angle disturbances caused by kinematic and compliance steer effects in rear-wheel steering
•
Implemented a physics-informed neural network to estimate compliance steer by considering various forces acting on suspension components, such as longitudinal force, lateral force, and aligning moment
•
Validated the accuracy of the models using ADAMS/Car simulations, demonstrating the potential to effectively reduce toe angle disturbances and enhance vehicle handling and stability
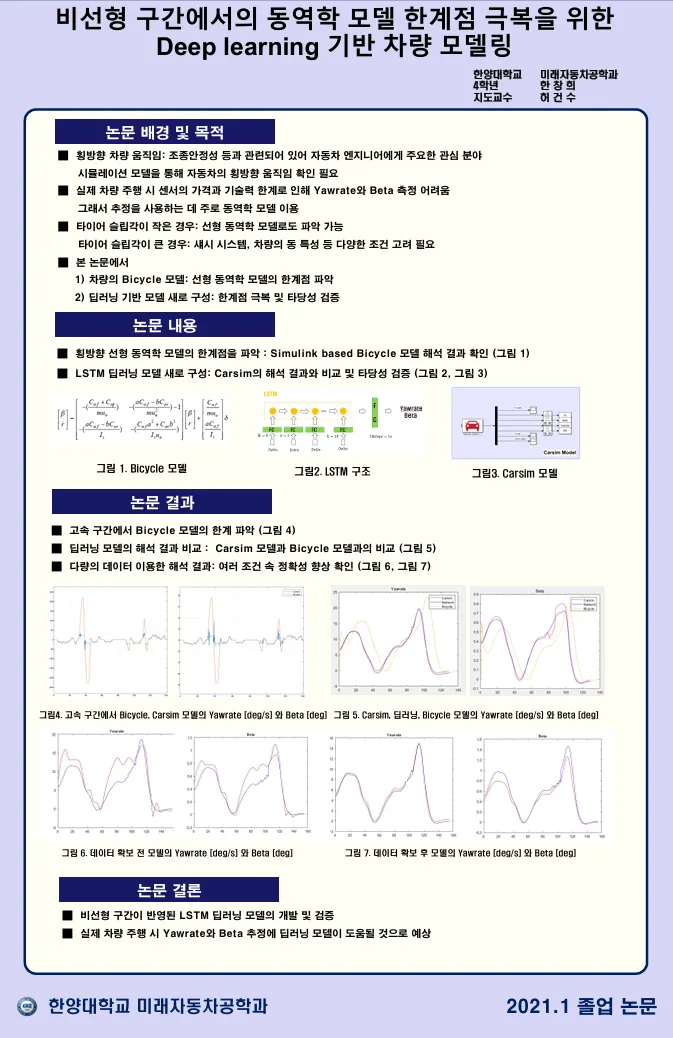
Design of Deep Learning-based Vehicle Modelling
(Bachelor’s Thesis)
•
Determined limitation of linear vehicle dynamic model through 2 DOF state-space bicycle model
•
Verified that the LSTM model with the appropriate algorithm estimated the yaw rate and side slip angle of the vehicle accurately in both low-speed and high-speed sections using Matlab/Simulink and Carsim
•
Utilized LSTM to handle time series data
Research Projects
Development of High-Performance Specialized Control Logic for Rear Wheel Independent Steering System (July. 2023 to Aug. 2024)
•
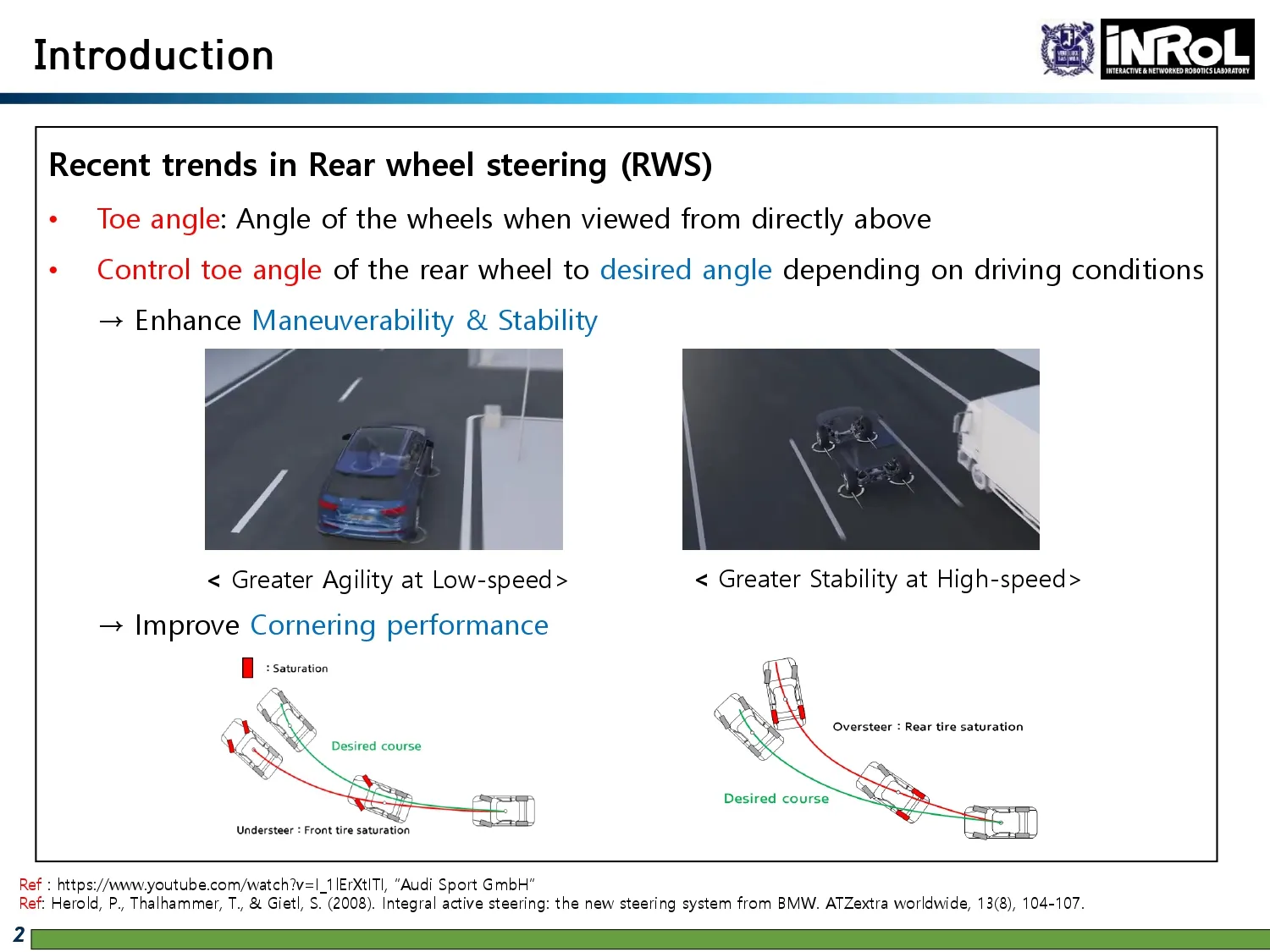
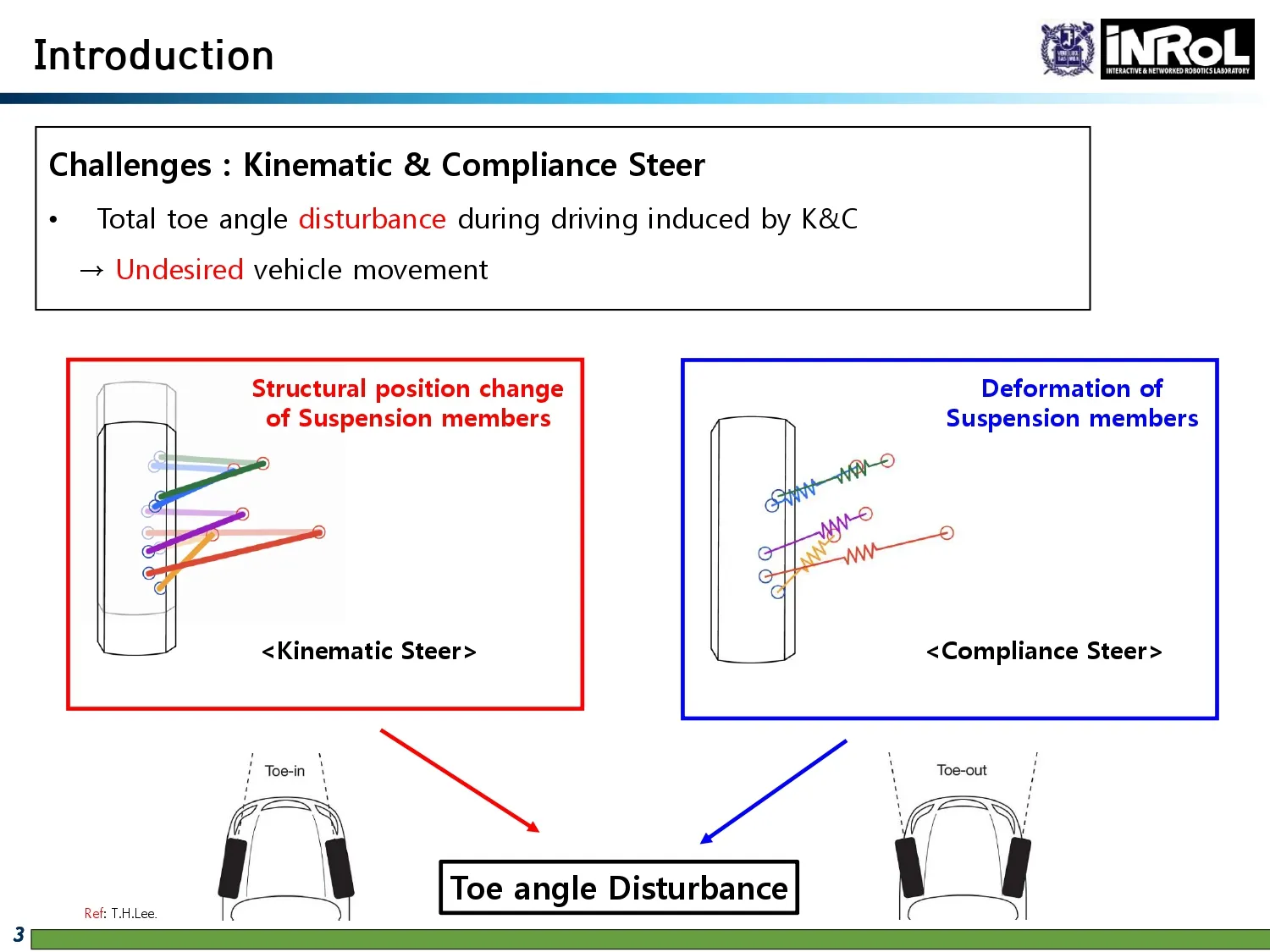
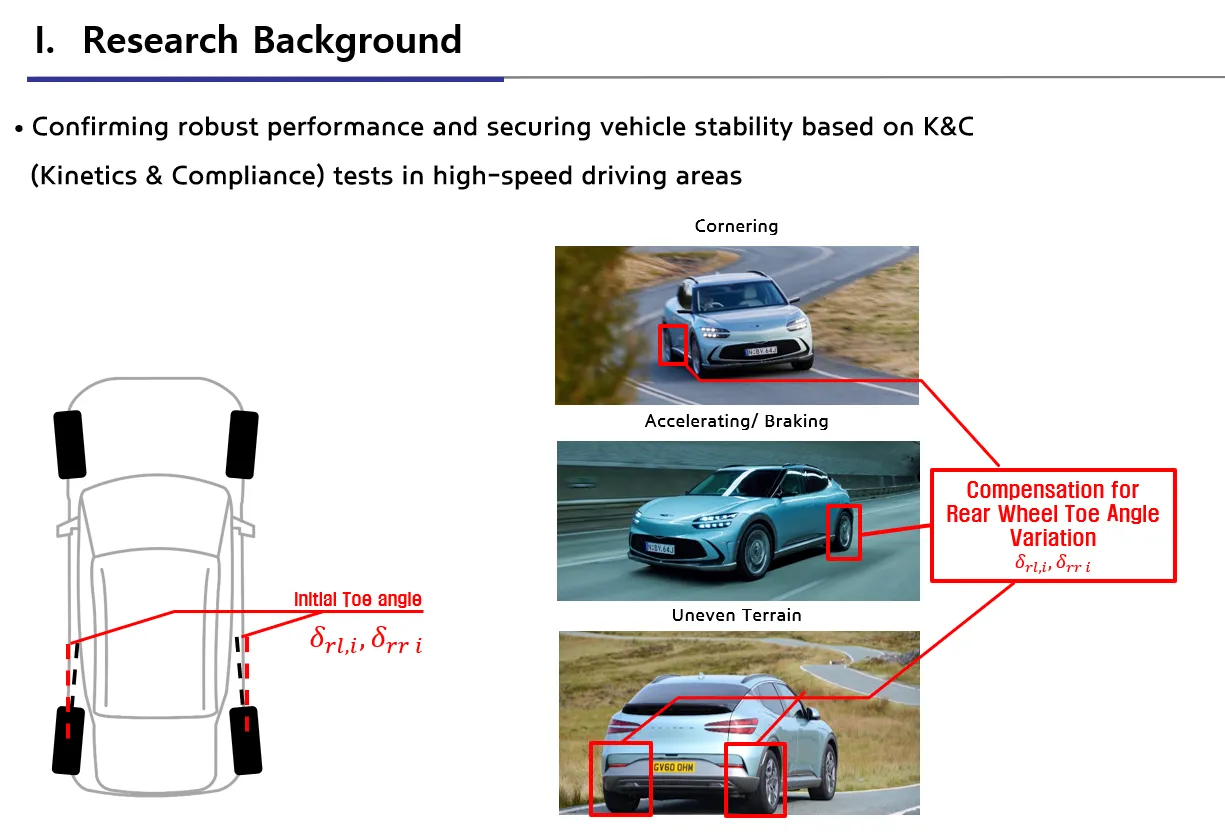
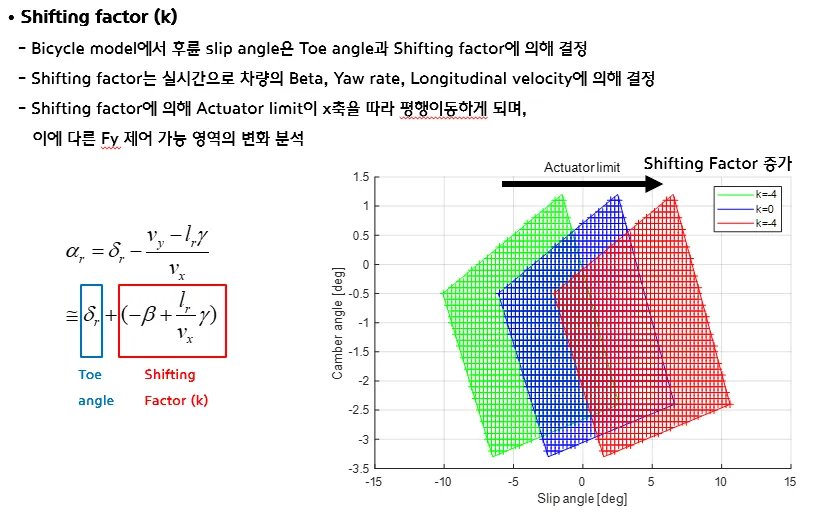
Conducting an in-depth study on the dynamics of rear-wheel steering, focusing on kinematic and compliance steer that led to toe angle variations and their direct impact on vehicle movement
•
Analyzing the significance of toe angle adjustments and how they influence vehicle behavior, particularly during high-speed driving conditions
•
Applying advanced simulation tools such as ADAMS/Car and Carsim, and kinematic models to understand and enhance vehicle track performance through rear wheel steering control
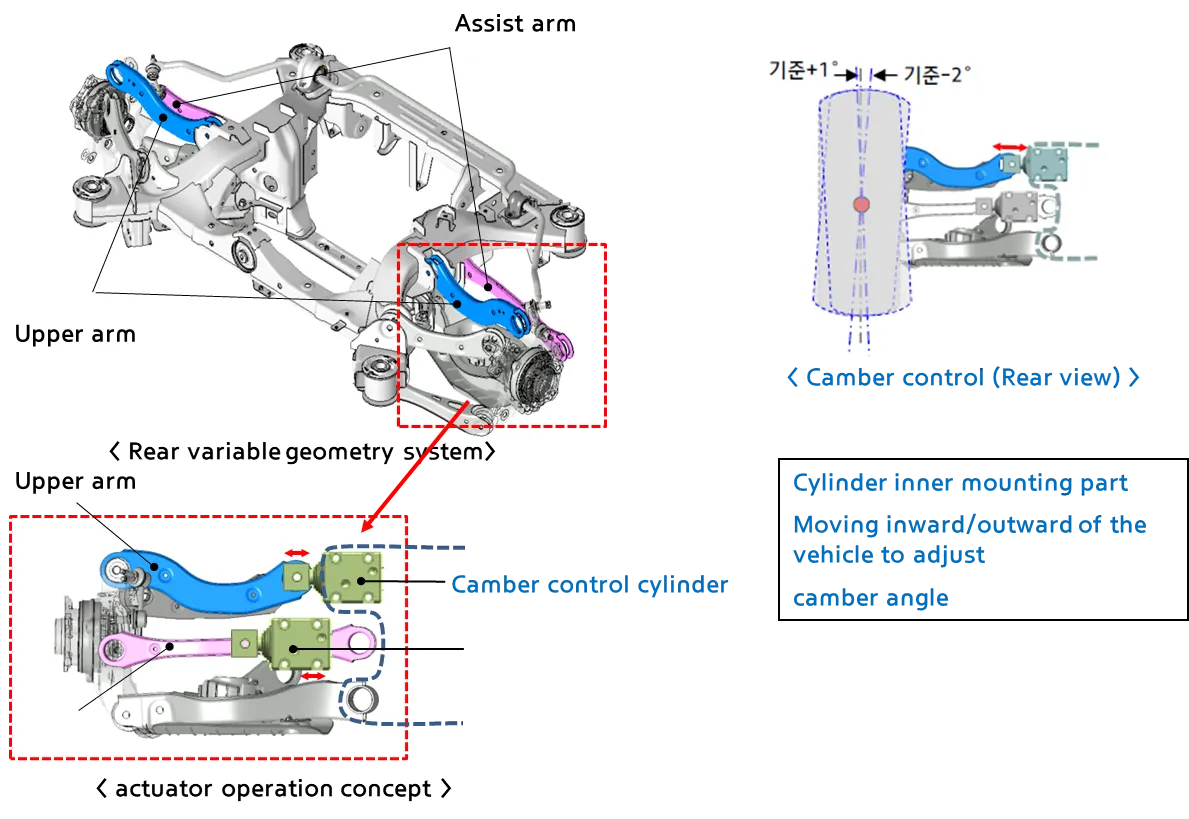
Development of Target Characteristic Tracking Controller for Enhanced Limit Handling Performance of Rear Wheel Variable Geometry System (Mar. 2022 to Dec. 2022)
•
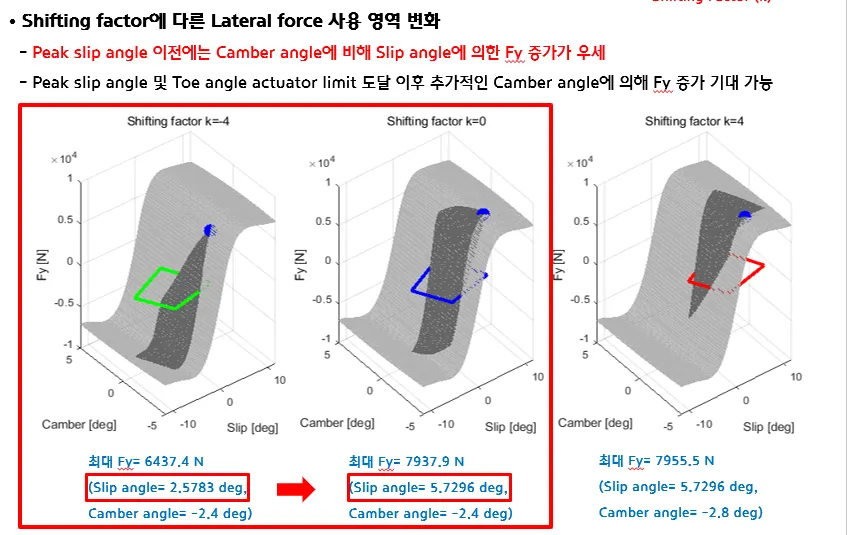
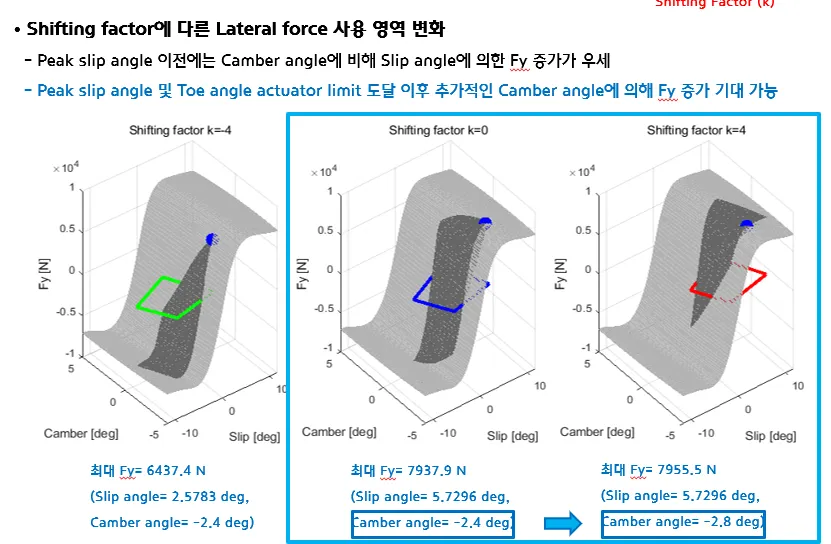
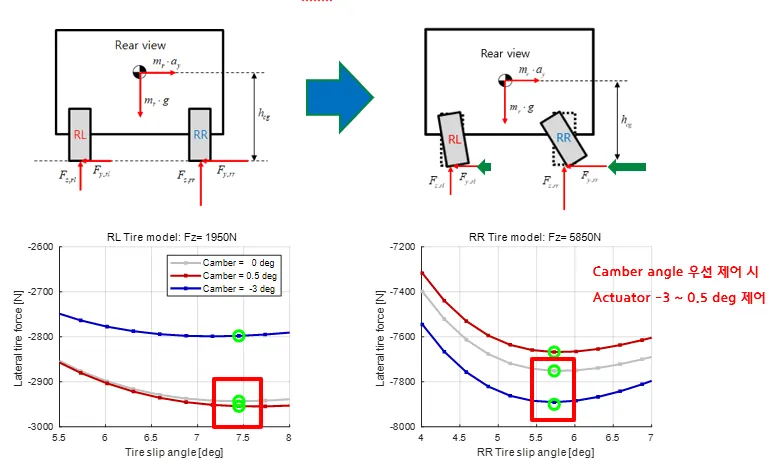
Enhanced high-speed cornering stability by controlling rear-wheel in-phase for maximum tire grip. Increased maximum lateral force by 172.1N (1.698%)
•
Conducted research specifically on controlling camber angles in the rear wheel variable geometry system
Conferences
Integrated Control of Rear-Wheel Variable Geometry Suspension for
Enhanced Stability (2023 Autumn Conference)
•
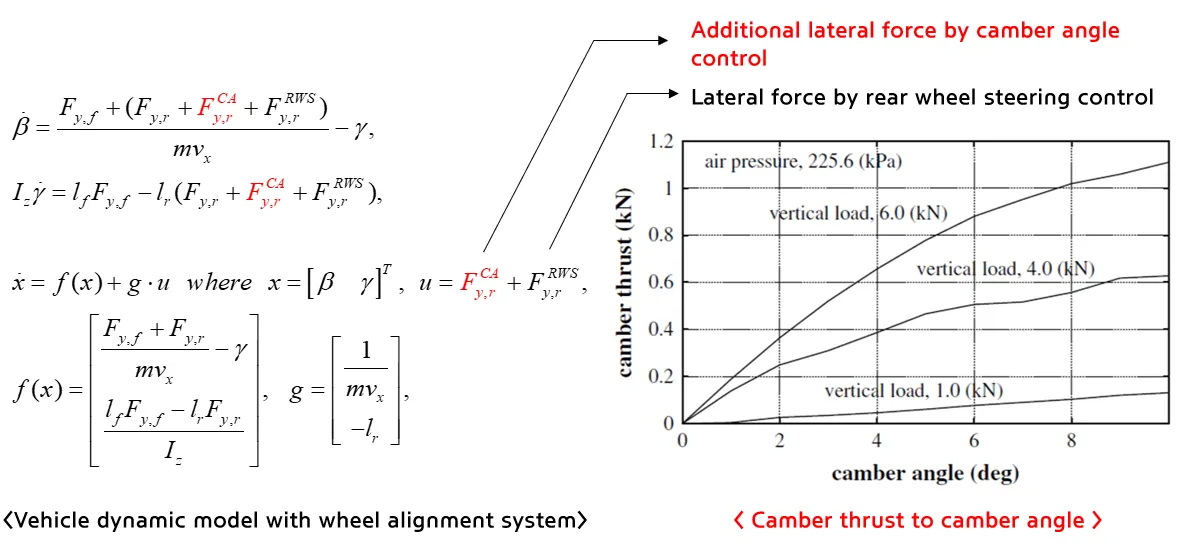
Designed and implemented an optimal control strategy that simultaneously manages camber and toe angles to maximize lateral force utilization
•
Developed a sliding mode controller with a feedforward term estimator to compensate for vehicle dynamic uncertainties and disturbances
•
Validated the effectiveness of the integrated control strategy through MATLAB/Simulink and CarSim simulations, demonstrating improved understeer characteristics during cornering maneuvers
Analysis of Tire Characteristics for Rear Wheel Variable Geometry Suspension
(2023 Spring conference)
•
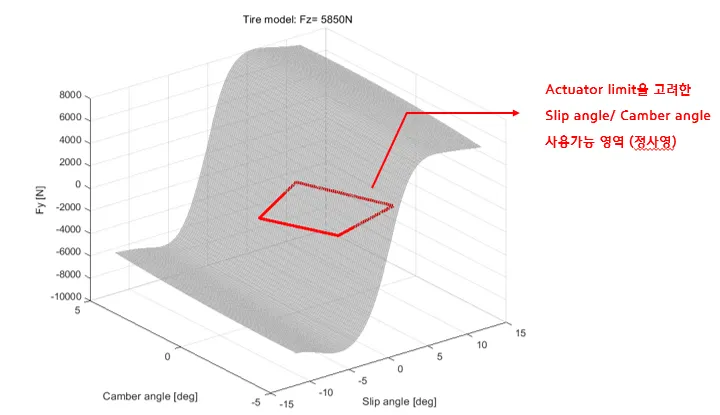
Research findings confirmed that precise adjustments of camber and toe angles according to driving conditions can achieve a maximum lateral force of approximately 17.6 N, which in turn improves vehicle stability during high-speed driving scenarios
•
Conducted in-depth analysis of tire characteristics associated with rear-wheel variable geometry suspension systems
•
Used the MTS platform and the Magic formula tire model to analyze tire data, focusing on camber and toe angle adjustments to optimize lateral force
Active Camber System Modelling for Lateral Stability Control
(2022 Autumn conference)
•
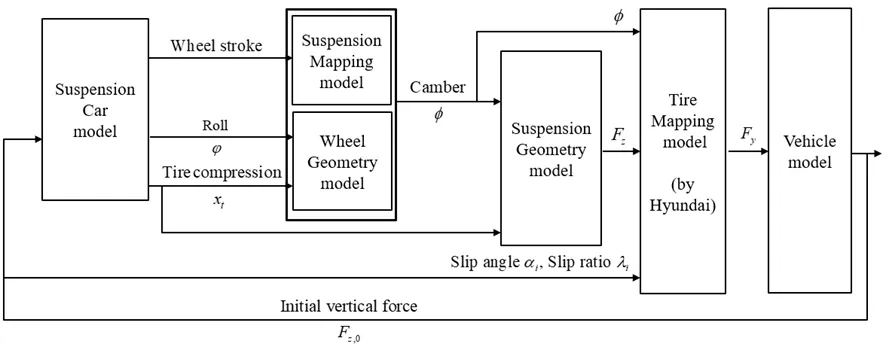
Developed an active camber system model focusing on lateral stability control
•
Introduced a wheel geometry model to describe camber angle changes due to vehicle roll and tire compression and also introduced a suspension mapping model detailing camber angle variations from wheel stroke changes.
•
Evaluated the system using vehicle test data from a suspension parameter measurement device (SPMD)
